Matrix Calculator - Online Solver & Formula Guide
Matrix is a vital metric in our daily routines, academic assignments, and professional workflows. This comprehensive guide details the mathematical principles, practical use cases, and steps to perform these calculations accurately. Mathematics, physics, and statistics are the foundation of modern technology, engineering, and data analysis. From calculating averages in academic studies to solving vertical circular motion equations in physics, precise calculations are essential. Numerical datasets, geometry formulas, base conversions, and quadratic equations require absolute accuracy. Our math and physics solvers are designed to perform complex computations instantly, helping you check homework, debug code, and analyze statistical variance with ease.
What is the Matrix Solver?
Matrix calculations are key in both personal planning and professional analysis. This online tool processes your inputs instantly in your browser to deliver accurate results. By analyzing the underlying variables, users can understand the relationships between inputs and identify key insights. Computational logic relies on applying established theorems and equations. Whether solving right triangles using the Pythagorean theorem, calculating population standard deviation, or converting binary values to hexadecimal, accuracy is key. These formulas model physical constraints and statistical spreads. Understanding how variables interact—such as the relationship between standard deviation and variance—helps data analysts and engineers extract meaningful information from raw data.
Best Practices & Pro-Tips
Optimizing Your Results
Mathematical Pro-Tip: When working with statistical datasets, check for outliers that can skew the arithmetic mean, and compare the mean with the median. When performing base conversions in code, use hexadecimal for readability and binary for debugging low-level logic. Make sure to verify your input units before running calculations.How to Use the Matrix Calculator
Input Data
Enter the required values into the form fields. Make sure to double-check the values for accuracy.
Verify Units
Ensure your values match the specified units (e.g. grams vs ounces, centimeters vs inches).
Run Calculation
Click the calculate button to process the mathematical formulas instantly in your browser.
Copy Results
Review the output, check the formulas, and copy or save the results for your records.
Formula & Computational Methodology
Understanding the mathematics behind the calculations helps clarify how the inputs relate to the final result. Our calculator processes the formulas instantly in your browser. Below is the equation used to calculate Matrix:
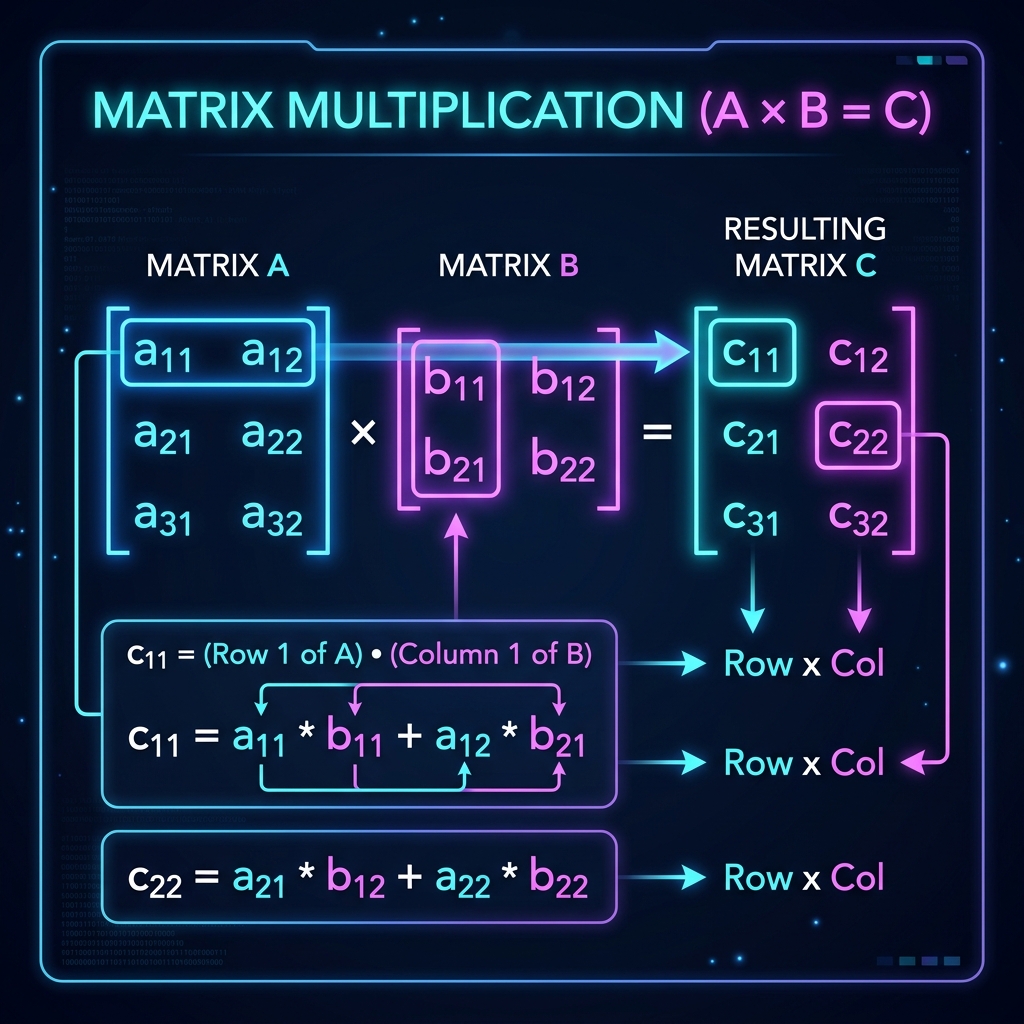
- Multiplication: \(C_{ij} = \sum_{k} A_{ik} B_{kj}\)
- Determinant of 2x2 Matrix: \(\text{det}(A) = ad - bc\)
Step-by-Step Calculation Examples
Review these examples to see how the mathematical formula is applied to different input values:
Example Scenario 1
Determinant of [[3, 2], [1, 4]]: (3 * 4) - (2 * 1) = 12 - 2 = 10.
Example Scenario 2
Multiplying [[1, 2], [3, 4]] by [[5, 6], [7, 8]]: Result matrix is [[19, 22], [43, 50]].
Common Applications & Industry Use Cases
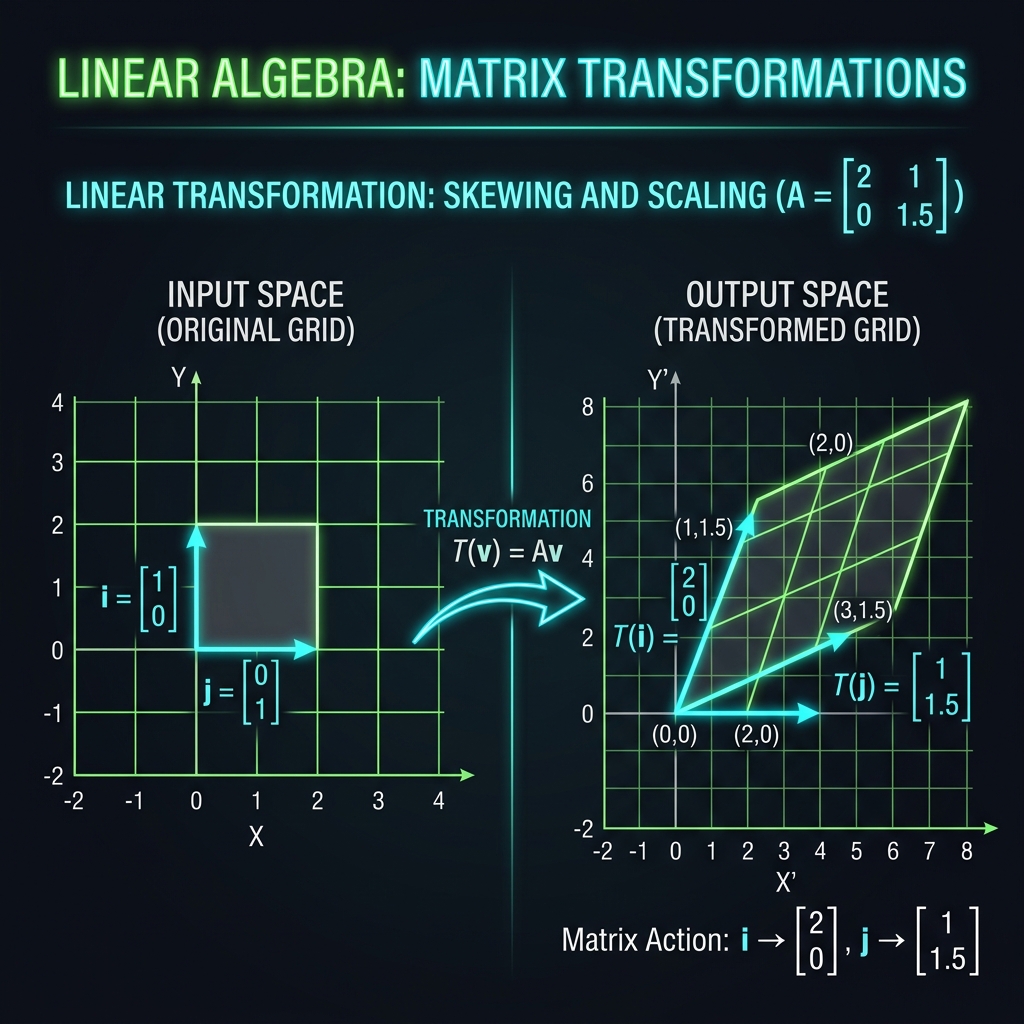
Graphics Programming
Calculate 3D coordinate transformations, scaling, and camera rotations.
Linear Equation Systems
Solve complex variables in engineering circuits and load simulations.
Data Science Algorithms
Analyze linear algebra models and feature transformations.
Frequently Asked Questions
Q: How does this online calculator perform calculations?
A: The calculations are processed instantly in your browser using standard mathematical formulas. Your data remains private and is never uploaded to external servers.
Q: What is an identity matrix?
A: A square matrix with ones on the main diagonal and zeros elsewhere, acting as the multiplicative identity.
Q: When is a matrix multiplication possible?
A: Multiplication is possible only if the number of columns in the first matrix equals the number of rows in the second matrix.
Explore Related Math Tools
Mastering mathematical calculations requires practice and the right tools. Whether you are a student verifying algebra equations, an engineer checking circuit specs using Ohm's Law, or an analyst calculating statistical variance, CalcSuit provides precise, free solvers to handle the heavy lifting.